

![]()
hier gehts zu meinem Shop: MZR "Modellbau-Zubehör-Rackel"


Der
Gama Goat soll Allradantrieb besitzen und die vordere und hintere Achse lenken können.
Ich hab mich für Kardanantriebe für die Lenkachsen entschieden.
Sie haben einen Außendurchmesser von 1.5
mm und sind mit 0,3 und 0,5mm Draht verstiftet.
Die Welle (1mm) ist kugelgelagert.


Eigenbauservo mit Widerstand für die proportionale Lenkung.
Auf der Mutter, die auf der
Spindel hin und her bewegt wird ist der Schleifer vom Linearpoti geklebt.
Die Elektronik wird von einem herkömmlichen Microservo gespendet.
Die Vorderachse wird über einen starren Draht angelenkt und die Hinterachse
über einen, am Kardangeklenk zum Anhänger, nach oben und unten abwinkwlbaren Stahldraht

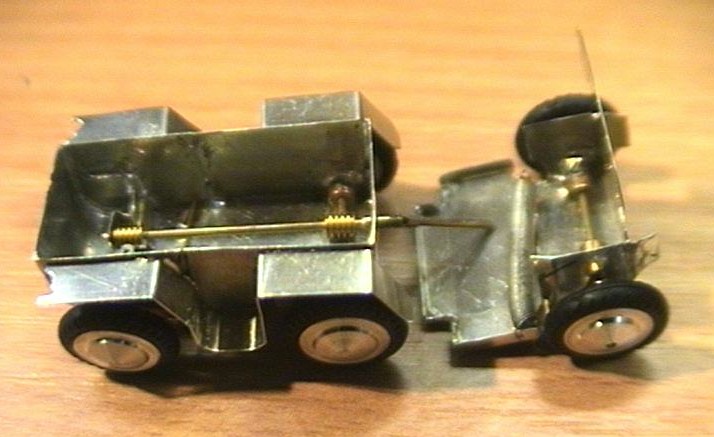
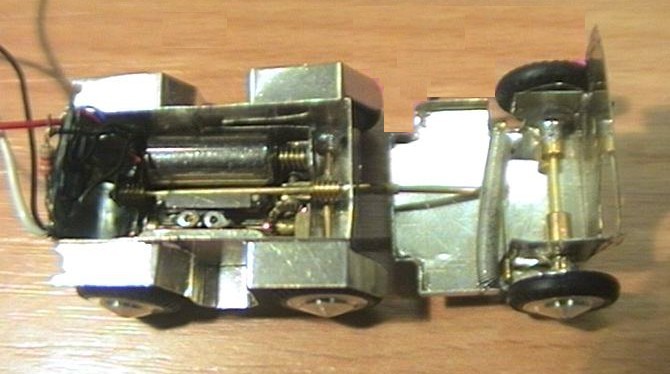
Von der Vorderachse schaut das Kardangelenk raus. Ebenfals über Kardan kommt die Kraft vom Hänger zum vorderen Teil. Durch die Kiesgrube werde ich wohl nicht fahren können.
Bei dem rechten Bild sind die Schneckengetriebe zu sehen welches im Anhänger noch fehlt.
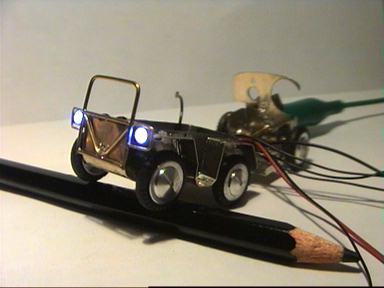
Die Räder sind von einem Überraschungseiauto. Die Felgen dazu neu gefertigt. Das Eigenbauservo habe ich so gebaut, dass es optimal in die " Bergziege" passt. Für die Beleuchtung habe ich wieder LED's verwendet.

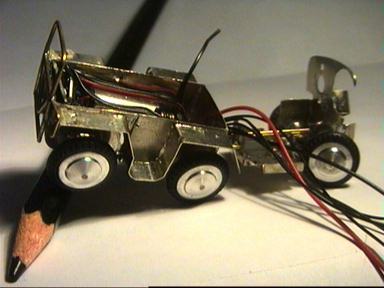
Auch beim Anhänger schauen die Gelenkwellen bei den eigeschlagenen Rädern raus. Der Anhänger kann nach oben und unten abknicken und ist um die Antriebswelle drehbar gelagert.


Nachdem sich eine Buchse der Antriebswelle gefressen hatte musste ich ein Stück Welle rausflexen und mit einer neuen Buchse wieder einpassen.
Das Ganze ist gelungen und vor lauter Freude entstanden diese ersten Fotos im Gelände (mit Kabelsteuerung)




Den
ersten richtigen Probelauf hatte das fertige Modell dann auf der Modellbaumesse
in Sinsheim 2002. Es zeigte sich als äußerst zuverlässig.Ich hatte die 4 Tage keine
einzige Störung. Im Gegenteil, die Getriebe sind richtig gut eingelaufen und die
Akkus hielten dadurch immer länger (mehr als 20 min.) durch. Der einzige Nachteil ist die
Kraft des Servos. Das ist doch etwas schwach geraten mit einer Untersetzung von
1:9 und der Gweindestange M1,2. Das nächste wird kräftiger. Die Schwäche liegt
aber auch daran, dass ich das Lenkrad und die Arme des Fahrers noch mit der
Lenkbewegung gekoppelt habe. Sieht richtig gut aus, wenn das kleine Männchen
versucht vetrzweifelt beim lenken zu helfen ;-)

Auch beim Anhänger schauen die Gelenkwellen bei den eigeschlagenen Rädern raus. Der Anhänger kann nach oben und unten abknicken und ist um die Antriebswelle drehbar gelagert.
Nachdem sich eine Buchse der Antriebswelle gefressen hatte musste ich ein Stück Welle rausflexen und mit einer neuen Buchse wieder einpassen.
Das Ganze ist gelungen und vor lauter Freude entstanden diese ersten Fotos im Gelände (mit Kabelsteuerung)
Den
ersten richtigen Probelauf hatte das fertige Modell dann auf der Modellbaumesse
in Sinsheim 2002. Es zeigte sich als äußerst zuverlässig.Ich hatte die 4 Tage keine
einzige Störung. Im Gegenteil, die Getriebe sind richtig gut eingelaufen und die
Akkus hielten dadurch immer länger (mehr als 20 min.) durch. Der einzige Nachteil ist die
Kraft des Servos. Das ist doch etwas schwach geraten mit einer Untersetzung von
1:9 und der Gweindestange M1,2. Das nächste wird kräftiger. Die Schwäche liegt
aber auch daran, dass ich das Lenkrad und die Arme des Fahrers noch mit der
Lenkbewegung gekoppelt habe. Sieht richtig gut aus, wenn das kleine Männchen
versucht vetrzweifelt beim lenken zu helfen ;-)